The beginning of automation
Automatic control is the application of technology used for regulation of technical processes without direct human intervention. In a simple case, a controller evaluates a measured  physical value and compares this to a desired set point for this measured value. In early industrial history, humans (or a Donald Duck the figure) acted as a controller as in the cartoon drawing. This was the early method of control: By manual supervision and action.
physical value and compares this to a desired set point for this measured value. In early industrial history, humans (or a Donald Duck the figure) acted as a controller as in the cartoon drawing. This was the early method of control: By manual supervision and action.
One of the first reports on automatic regulation was the water clock reported to be in use in Greece and other places more than 2200 years ago. The time was measured by gauging the amount of water leaving a small hole in a water filled vessel.
However, to make it work accurately, the water level, and thus the pressure on the water side of the hole should be regulated to be approximately constant. This was accomplished by letting a continuous flow of water to flow into the reservoir. This flow was greater than the loss of water at the bottom of the reservoir that fed the clock with  a constant dripping stream. So an overflow pipe was supplied near the top of the reservoir to make the water level constant. Thus constant water pressure was maintained, and the clock hand moved proportional to the time passed.
a constant dripping stream. So an overflow pipe was supplied near the top of the reservoir to make the water level constant. Thus constant water pressure was maintained, and the clock hand moved proportional to the time passed.
The illustration is taken from the New York Public Library Digital collections.
The control principle for regulation in this device is that an offset from the set point (increasing water level) is adjusted by water flowing off the upper out-flow pipe. In control theory terms, this is a kind of proportional controller (P-control).
Many hundred years later, early automatic control devices popped up during the industrial revolution. Examples are speed controllers (the Watts regulator) and pressure regulators. The Watts regulator  was used to control the speed of rotating machinery by measuring the speed of rotation by the centrifugal device, which then adjusted the flow of steam or fuel to a machine. The Watts regulator is shown in the following figure.
was used to control the speed of rotating machinery by measuring the speed of rotation by the centrifugal device, which then adjusted the flow of steam or fuel to a machine. The Watts regulator is shown in the following figure.
Despite the long history of automatic control, it was not until 1861 that a mathematical analysis on what was actually going on in the Watts governor was published by James Clerk Maxwell in the publication On Governors.
This might be thought of as the starting point of control theory, and probably the first use of models for analyzing control behavior
The well-known PID controller was developed and analyzed following the early industrial revolution, and PID control was applied for industrial control as well as in maritime steering applications (auto-pilots) and in the area of manned air flights.
Automation and control after World World II
The automation history changed direction during World War II. Control theory became an important part of fire-control systems, guidance systems and electronics.
The space race from the 1960s and onwards brought forward new theories and an array of control methods based on the use of models. These methods and theories will be the main background of this web site, with emphasis on the applied aspects of these theories and how to find and apply the models needed to use these methods.
The word cybernetics stems from the Greek word κυβερνήτης meaning steersman governor, pilot or rudder (the same root as government).
Cybernetics and automation history
Cybernetics is a word often associated with automation and control. Cybernetics as a term was in later times coined by André-Marie Ampère (the guy with the electric current) in his 1834 essay. The term was later borrowed by Norbert Wiener in his book Cybernetics, where he defined cybernetics as the study of control and communication in the animal and the machine.
The roots of cybernetics goes even further back, and has its roots as a term which goes back to Plato when he writes about the study of self-governance in The Alcibiades. Cybernetics is a broad field of study, but the essential goal of cybernetics is to understand and define the functions and processes of systems that have goals and that participate in circular, causal chains that move from action to sensing to comparison with a desired goal, and again to action. Such a feedback system is shown in the accomanying figure showing a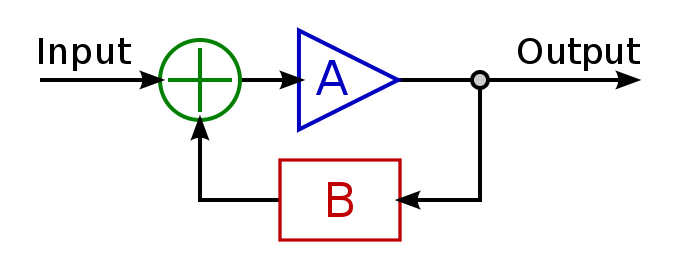 simple feedback system where AB < 0 (negative feedback).
simple feedback system where AB < 0 (negative feedback).
Norbert Wiener worked during the World War II on automatic aiming and firing of anti-aircraft guns. This resulted in the Wiener filter for optimal noise suppression and dynamic predictions in control systems. The Wiener filter is an early version of a Kalman filter, later developed by and getting its name from Rudolf Kalman.
Today, a world without automation and man made control is unthinkable. Production plants have thousands of control loops and air planes, cars, sattelites, almost anything technical. It’s hidden i some way and all around us.