- The state to be controlled (i.e. a temperature) has to be known with sufficient accuracy. This is usually done by measuring the process state in some way, i.e. with a thermic resistor. If the state cannot be measured directly, it must be calculated or estimated in some way with a sufficient precision by some method.
- Means to control the process must be available, such as the amount of fuel feeding an engine. In addition, knowledge must be available as to how the process reacts to changes in the control input variable.
This might be easy, or even implicit, as in the case with the water clock, where the “too much water” case increases the water outflow so that the water level is stabilized.
Another easy case, but where control technology is used, is a level control loop in a vessel with continuous in- and out flow. If the in-flow varies, the out flow can be automatically controlled by measuring the level and change the opening of the out-flow valve to keep a constant level. This can be done on an intuitive basis, by knowing that opening the out-flow valve will reduce the level (or the level increase rate). Such a control system is shown in the figure below.
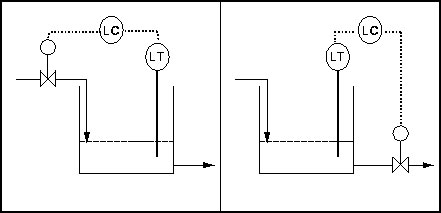
Another situation is where the output flow varies. In this case, the in-flow may be varied to control the level.
In this case an explicit model is probably not used, even if a type of model is used in the control engineer’s head (knowledge about what happens if the controlled valve opening is changed, an also about the associated speed of level response. A model could however help the engineer in doing the design.
In summary, models may be used for estimation (point 1. above) and control (point 2. above). Models are used either implicitly in the control engineers head for designing a system or
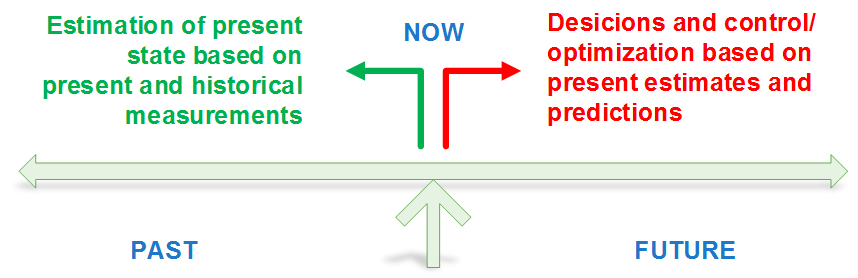 as part of a soft sensor or a Kalman filter for state estimation and as part of some type of model based control algorithm to compute the best control action. These principles of model-used is shown in the figure to the left
as part of a soft sensor or a Kalman filter for state estimation and as part of some type of model based control algorithm to compute the best control action. These principles of model-used is shown in the figure to the left
So we need models for control and automation purposes. This is always true and mostly without exception in man-made technical systems. Exceptions are physical or biological mechanism, or a system in general, if it has has internal controls built in; such as in the water clock described here or as in a living organism. In a living organism, complex control mechanisms are built into the system itself (the living individual); probably developed through evolutionary processes where working functionality has survived. In these processes, the models are built into the nervous system or embedded into biological mechanisms.
In an engineering setting, the model may also be implicit in the sense that knowledge about the way things functions, only exists in the designing engineers head.
However, the last 50-60 years or so, has made it clear that explicit use of models make earlier impossible control- and estimation tasks possible and makes other ones to perform better. Examples are many, such as GPS navigation systems, ship systems for navigation, steering and dynamic positioning, petrochemical processes and many more.
It is of utmost importance that models for control have a suitable level of complexity. If the models for control are too complex, it will not work. A model used for estimation has to be observable, and a model for control has to be controllable. Another fact is that a complex model needs more parameters to be adapted, and such parameters are always hampered by uncertainty.
The largest model for control I have been involved in using myself for control purposes has had around 30 state variables. This is in stark contrast to i.e. hydrodynamic detailed modes, which may have tens of thousands of state variables. But this is not imperative. Contemporary numerical meteorology is using Kalman filtering in the context of extremely high dimensional and complex weather models.
The terminology definition related to model building will be as described earlier for controls, state variables, disturbances and measurement variables. In addition, the will parameters mean constants in the model equations. The parameters may be uncertain and/or slowly varying.